1668A, 14th Main Rd, Sector 7, HSR Layout, Bengaluru, Karnataka 560102
+91 99459 30733 (9am - 6pm IST, Saturday - Sunday) (10am - 7pm IST, Tuesday - Friday)
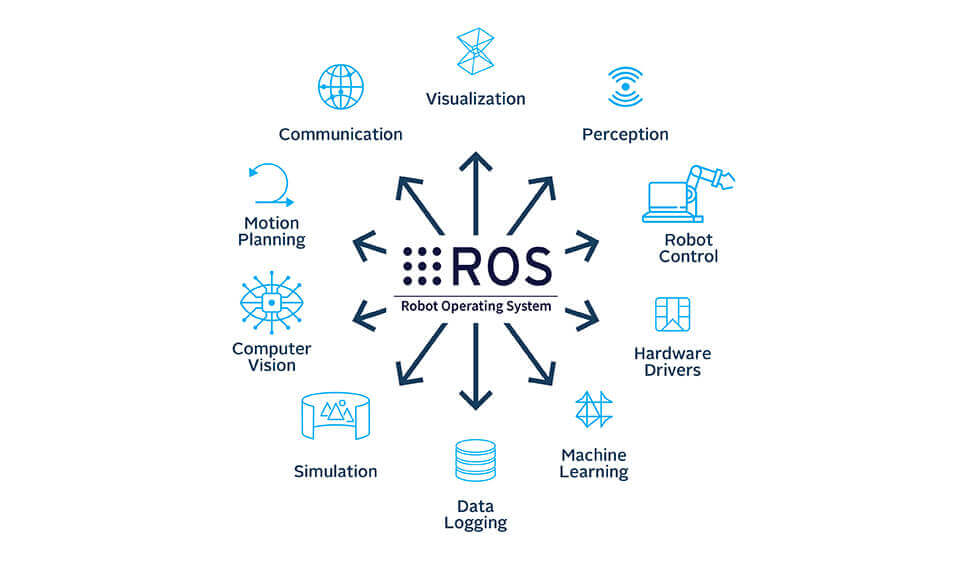
In this course the student will learn about ROS which is widely used in industry for building robotic applications. The student will first start from the basic level of what is nodes, packages,services and will learn all the way upto creating a custom robot and simulating it.
1-Introduction
2-Packages, Nodes and tools in ROS
3-ROS Services, Actions, Parameters and Launch Files
4-Gazebo, SLAM and Path Planning
5-Creating custom robot and custom gazebo world
6-Nodes, services, parameters, launch files in ROS2