

A light-following robot is an autonomous robot designed to move towards a light source. It uses light sensors to detect the intensity of light and steers itself in the direction where the light is strongest. This project is a great way to learn about sensor integration, and motor control.

The Obstacle Avoider Robot is an autonomous robotic system designed to navigate its environment while avoiding obstacles. It employs IR sensors to detect objects in its path and makes real-time decisions to change direction, ensuring smooth and uninterrupted movement.
A Theremin is an electronic musical instrument controlled without physical contact by the performer. This project involves creating a simplified version of a Theremin using ultrasonic sensors to control sound frequency and volume.
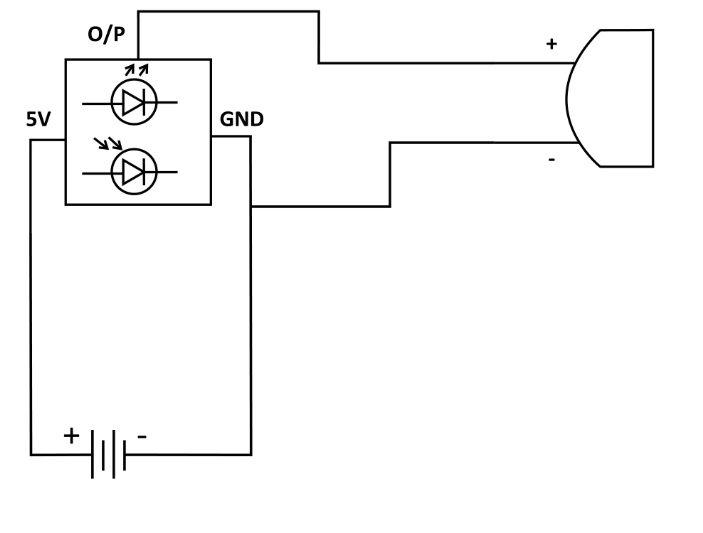
An IR receiver circuit is designed to detect and decode infrared signals transmitted from an IR remote control. This project can be utilized in various applications such as remote-controlled appliances, robots, and other electronic devices.
